Here is a LCD based Digital Clock project using only 8051. This digital clock is configured in a 12 hour mode and switches are given for set the hours, minutes, and AM/PM.
Note :-
Use push on - push off switches here do not use toggle switches for set the hours, minute, am/pm and start. For reset of microcontroller use toggle switch.
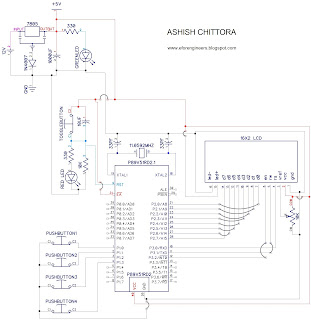
Circuit Diagram :-
download and zoom in the photo so you can clearly all the connections.
Pink lines - 12 volt
Red lines - 5 volts
Black lines - ground
Blue lines - data
Components Required :-
330 0HM RESISTANCE - 2
10K OHM RESISTANCE - 2
10K OHM VARIABLE RESISTANCE - 1
33PF CAPACITOR - 2
10UF CAPACITOR - 1
1000UF CAPACITOR - 1
11.0592 MHZ CRYSTAL OSCILLATOR - 1
GREEN LED - 1
Process to set Time :-
Start button - 1st button
hour set - 2nd button
minute set - 3rd button
am-pm set - 4th button
Code :-
----------------------------------------------------------------------------------------------------------------------------------
// Program to make a digital clock using LCD
#include<reg51.h>
#define m_sec 10
sbit rs = P3^0;
sbit rw = P3^1;
sbit en = P3^2;
sbit hrs=P1^1;
sbit mns=P1^2;
sbit start=P1^0;
sbit am_pm=P1^3;
int hr ,hr1=0;
int min,min1=0;
int sec,sec1=0,ampm=0;
void delay(unsigned int msec) // Time delay funtion
{
int i,j ;
for(i=0;i<msec;i++)
for(j=0;j<1275;j++);
}
void lcd_cmd(unsigned char item) // Function to send command on LCD
{
P2 = item;
rs= 0;
rw=0;
en=1;
delay(1);
en=0;
return;
}
void lcd_data(unsigned char item) // Function to send data on LCD
{
P2 = item;
rs= 1;
rw=0;
en=1;
delay(1);
en=0;
return;
}
void lcd_data_string(unsigned char *str) // Function to send string on LCD
{
int i=0;
while(str[i]!='\0')
{
lcd_data(str[i]);
i++;
delay(1);
}
return;
}
lcd_data_int(int time_val) // Function to send number on LCD
{
int int_amt;
int_amt=time_val/10;
lcd_data(int_amt+48);
int_amt=time_val%10;
lcd_data(int_amt+48);
}
void lcd(unsigned char str1[10]) // Function to initialize LCD
{
lcd_cmd(0x38); //2 LINE, 5X7 MATRIX
lcd_cmd(0x0e); //DISPLAY ON, CURSOR BLINKING
delay(m_sec);
lcd_data_string(str1);
}
void set_hr1() // Function to set hour
{
hr1++;
if(hr1>11)
hr1=0;
lcd_cmd(0xc3);
lcd_data_int(hr1);
lcd_data(':');
}
void set_min1() // Function to set minute
{
min1++;
if(min1>59)
min1=0;
lcd_cmd(0xc6);
lcd_data_int(min1);
}
void main()
{
int k;
start=1;
hrs=1;
mns=1;
lcd_cmd(0x01);
lcd_cmd(0x83);
lcd("SET TIMING");
lcd_cmd(0xc3);
lcd_data_int(hr1);
lcd_data(':');
lcd_data_int(min1);
while(start==0)
{
delay(200);
if(hrs==0)
set_hr1();
if(mns==0)
set_min1();
}
if(am_pm==0)
{
lcd_cmd(0xc8);
lcd_data_string("am");
ampm=0;
}
if(am_pm==1)
{
lcd_cmd(0xc8);
lcd_data_string("pm");
ampm=1;
}
delay(200);
lcd_cmd(0x01);
while(1)
{
for(k=0;k<2;k++)
{
for(hr=hr1;hr<12;hr++)
{
for(min=min1;min<60;min++)
{
for(sec=0;sec<60;sec++)
{
lcd_cmd(0x82);
delay(1);
lcd_data_int(hr);
lcd_data(':');
lcd_data_int(min);
lcd_data(':');
lcd_data_int(sec);
if(ampm==0)
{
lcd("am");
}
else
{
lcd("pm");
}
lcd_data_string(" ");
delay(100);
}
}
min1=0;
}
if(ampm==0)
ampm=1;
else
ampm=0;
hr1=0;
}
}
}
---------------------------------------------------------------------------------------------------------------------------------
Calculations in this program are standard.
Pictures :-


Video :-
Proteus video :-
Note :-
Use push on - push off switches here do not use toggle switches for set the hours, minute, am/pm and start. For reset of microcontroller use toggle switch.

Circuit Diagram :-
download and zoom in the photo so you can clearly all the connections.
Pink lines - 12 volt
Red lines - 5 volts
Black lines - ground
Blue lines - data
7805 IC - 1
1N4007 diode - 1330 0HM RESISTANCE - 2
10K OHM RESISTANCE - 2
10K OHM VARIABLE RESISTANCE - 1
33PF CAPACITOR - 2
10UF CAPACITOR - 1
1000UF CAPACITOR - 1
11.0592 MHZ CRYSTAL OSCILLATOR - 1
GREEN LED - 1
RED LED - 116X2 LCD - 1
12 volt battery upto 1.5 amp. -1
P89V51RD2 MICROCONTROLLER - 1
TOGGLE BUTTON - 1
12 volt battery upto 1.5 amp. -1
P89V51RD2 MICROCONTROLLER - 1
TOGGLE BUTTON - 1
PUSH ON-OFF SWITCH - 1
16x2 LCD - 1
MALE AND FEMALE CONNECTORS LINES
CONNECTING WIRES.
CONNECTING WIRES.
Process to set Time :-
Start button - 1st button
hour set - 2nd button
minute set - 3rd button
am-pm set - 4th button
- push the start button. (start button off and clock do not start)
- now push the hour or minute buttons according to set time (do no push repeatedly push only one time).
- Now Push off the hour and minute buttons for stopping the time increasing.
- Push the am-pm button according to the am-pm
- Now push on the start button now for starting the clock.
Code :-
----------------------------------------------------------------------------------------------------------------------------------
// Program to make a digital clock using LCD
#include<reg51.h>
#define m_sec 10
sbit rs = P3^0;
sbit rw = P3^1;
sbit en = P3^2;
sbit hrs=P1^1;
sbit mns=P1^2;
sbit start=P1^0;
sbit am_pm=P1^3;
int hr ,hr1=0;
int min,min1=0;
int sec,sec1=0,ampm=0;
void delay(unsigned int msec) // Time delay funtion
{
int i,j ;
for(i=0;i<msec;i++)
for(j=0;j<1275;j++);
}
void lcd_cmd(unsigned char item) // Function to send command on LCD
{
P2 = item;
rs= 0;
rw=0;
en=1;
delay(1);
en=0;
return;
}
void lcd_data(unsigned char item) // Function to send data on LCD
{
P2 = item;
rs= 1;
rw=0;
en=1;
delay(1);
en=0;
return;
}
void lcd_data_string(unsigned char *str) // Function to send string on LCD
{
int i=0;
while(str[i]!='\0')
{
lcd_data(str[i]);
i++;
delay(1);
}
return;
}
lcd_data_int(int time_val) // Function to send number on LCD
{
int int_amt;
int_amt=time_val/10;
lcd_data(int_amt+48);
int_amt=time_val%10;
lcd_data(int_amt+48);
}
void lcd(unsigned char str1[10]) // Function to initialize LCD
{
lcd_cmd(0x38); //2 LINE, 5X7 MATRIX
lcd_cmd(0x0e); //DISPLAY ON, CURSOR BLINKING
delay(m_sec);
lcd_data_string(str1);
}
void set_hr1() // Function to set hour
{
hr1++;
if(hr1>11)
hr1=0;
lcd_cmd(0xc3);
lcd_data_int(hr1);
lcd_data(':');
}
void set_min1() // Function to set minute
{
min1++;
if(min1>59)
min1=0;
lcd_cmd(0xc6);
lcd_data_int(min1);
}
void main()
{
int k;
start=1;
hrs=1;
mns=1;
lcd_cmd(0x01);
lcd_cmd(0x83);
lcd("SET TIMING");
lcd_cmd(0xc3);
lcd_data_int(hr1);
lcd_data(':');
lcd_data_int(min1);
while(start==0)
{
delay(200);
if(hrs==0)
set_hr1();
if(mns==0)
set_min1();
}
if(am_pm==0)
{
lcd_cmd(0xc8);
lcd_data_string("am");
ampm=0;
}
if(am_pm==1)
{
lcd_cmd(0xc8);
lcd_data_string("pm");
ampm=1;
}
delay(200);
lcd_cmd(0x01);
while(1)
{
for(k=0;k<2;k++)
{
for(hr=hr1;hr<12;hr++)
{
for(min=min1;min<60;min++)
{
for(sec=0;sec<60;sec++)
{
lcd_cmd(0x82);
delay(1);
lcd_data_int(hr);
lcd_data(':');
lcd_data_int(min);
lcd_data(':');
lcd_data_int(sec);
if(ampm==0)
{
lcd("am");
}
else
{
lcd("pm");
}
lcd_data_string(" ");
delay(100);
}
}
min1=0;
}
if(ampm==0)
ampm=1;
else
ampm=0;
hr1=0;
}
}
}
---------------------------------------------------------------------------------------------------------------------------------
Calculations in this program are standard.
Pictures :-


Video :-
Proteus video :-
IF YOU HAVE ANY QUERY THAN CONTACT US OR GIVE YOUR QUERY IN THE QUERY OPTION.